
Corrección de deformidades complejas de pie y tobillo mediante fijación externa hexápoda: planificación asistida por software y biomodelos 3D
Correction of complex foot and ankle deformities using hexapod external fixation: software-assisted planning and 3D biomodels
Introducción
Las deformidades graves del pie y tobillo suponen un problema clínico y funcional de gran relevancia. Estas alteraciones no solo limitan la capacidad de la marcha, sino que incrementan el riesgo de ulceraciones, infecciones y pérdida de la extremidad. El diagnóstico y el tratamiento de estas deformidades son a menudo complejos, al involucrar distintas articulaciones con deformidades en varios planos del espacio.
Debemos tener en cuenta que el objetivo de cualquier intervención quirúrgica es conseguir un pie indoloro, plantígrado y que permita calzarse de manera corriente, siendo objetivos secundarios un pie con movilidad completa, flexibilidad y perfección anatómica.
El tratamiento quirúrgico de estos pacientes es complejo y con frecuencia insatisfactorio cuando se emplean técnicas tradicionales. Dichas técnicas se basaban en la realización de osteotomías abiertas y correcciones agudas de las deformidades mediante el uso de osteosíntesis; sin embargo, presentan múltiples inconvenientes, como la necesidad de resecar grandes cantidades de hueso que puede alterar la biomecánica de la marcha, complicaciones derivadas del material de osteosíntesis en pacientes complejos, como diabéticos con úlceras, etc.(1,2).
La fijación externa circular tiene sus orígenes en los trabajos de Gavriil Ilizarov en la década de 1950(3,4). Su método, basado en la distracción osteogénica, permitió realizar correcciones progresivas de deformidades óseas preservando la biología y las partes blandas(5). Décadas más tarde, la introducción del Taylor Spatial Frame® (TSF) supuso un hito, al aplicar los principios de un hexápodo mecánico, posibilitando la corrección multiplanar controlada por software, generando un sistema con 6 grados de libertad que permitía corregir cualquier deformidad con exactitud de 1 grado o 1 mm en cualquier plano (Figura 1)(6,7,8). Posteriormente, sistemas como el TL-Hex® o las versiones más modernas como el Smart-TSF® incorporaron mejoras en precisión, interfaces de software más intuitivas y herramientas de planificación avanzada(9).
rpt.3902.fs2509007-figura1.png
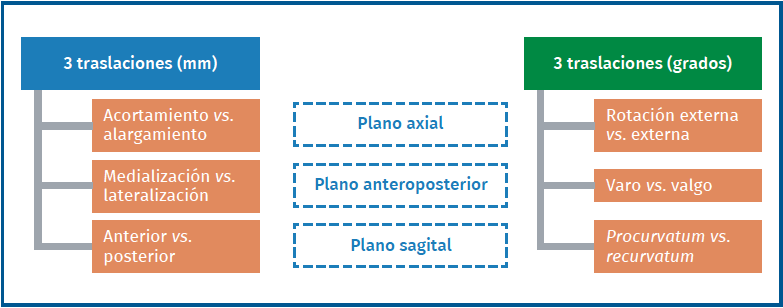
Figura 1. Seis grados de libertad: 3 traslaciones y 3 rotaciones que debemos describir en la deformidad.
El pie y el tobillo representan un reto especial para la fijación externa debido a la pequeña dimensión de los segmentos óseos, la complejidad articular del retropié, el mediopié y el antepié, y la vulnerabilidad de las partes blandas. Estas dificultades se suman a la frecuente presencia de comorbilidades como la diabetes y las neuropatías periféricas, que limitan las opciones de cirugía abierta convencional. En este escenario, los fijadores hexápodos asistidos por software se presentan como una alternativa moderna, segura y versátil, ofreciendo una opción mínimamente invasiva, dinámica, versátil, fisiológica y exacta(6,10). Sin embargo, no hay que ignorar algunos inconvenientes, como la curva de aprendizaje, el coste del sistema, la necesidad de la colaboración del paciente y la familia, el aumento de tiempo en consulta y, en algunos casos, la necesidad de mantener el miembro en descarga hasta 12 semanas.
Análisis de la deformidad
El análisis preciso de la deformidad constituye el paso más importante de todo el proceso. Un error en esta fase conduce inevitablemente a una corrección incompleta o inadecuada. Es imprescindible obtener radiografías en carga de buena calidad, incluyendo las proyecciones anteroposterior, lateral y axial, que muestren con claridad la alineación global del pie y tobillo. Estas imágenes deben complementarse con una tomografía axial computarizada (TAC) que permita reconstrucciones multiplanares y tridimensionales(11).
rpt.3902.fs2509007-figura2.png

Figura 2. Dos biomodelos fabricados a partir de tomografía computarizada, colocados junto a la deformidad del paciente al que corresponden antes de la cirugía.
Los biomodelos 3D fabricados a partir de la TAC aportan ventajas únicas: permiten comprender de manera intuitiva la deformidad, manipularla manualmente, planificar con exactitud la cirugía y realizar un premontaje del fijador sobre el biomodelo, evitando conflictos de espacio y reduciendo el tiempo quirúrgico. Además, estos modelos son de gran utilidad docente y facilitan la explicación del procedimiento al paciente y su familia (Figura 2)(12).
rpt.3902.fs2509007-figura3.png
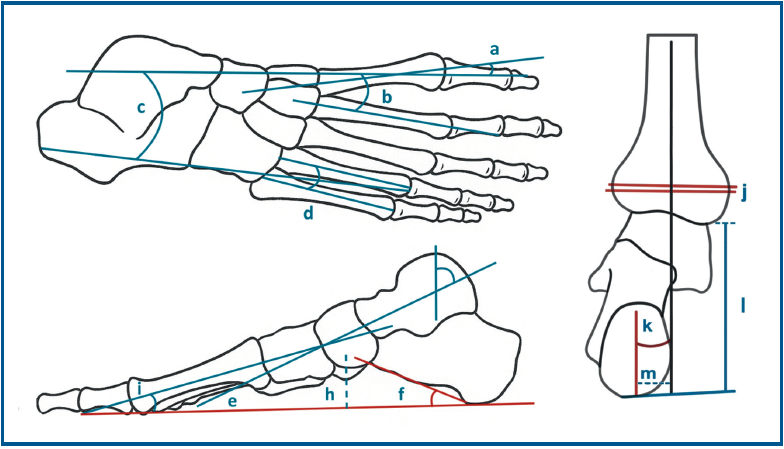
Figura 3. Mediciones que realizar en pie y tobillo para describir la deformidad. a: ángulo astrágalo del primer metatarsiano: b: ángulo intermetatarsiano: c: ángulo astragalocuboides; d: ángulo entre 4.º y 5.º metatarsianos; e: ángulo de Méary; f: ángulo de inclinación del calcáneo; h: altura de escafoides a plano de carga; i: ángulo de inclinación del primer metatarsiano; j: ángulo tibiotalar en anteroposterior; k: ángulo tibiocalcáneo; l: altura de maléolo medial a plano carga; m: traslación lateral del calcáneo respecto al eje tibial.
El análisis debe realizarse siempre en los 3 planos del espacio (Figura 3):
- En el plano anteroposterior se evalúan el varo-valgo y las traslaciones mediales y laterales.
- En el plano sagital, el ángulo de Meary, el equino o la dorsiflexión, y las traslaciones anteroposteriores.
- En el plano axial, se valoran las rotaciones internas o externas, la supinación y pronación, así como los acortamientos o alargamientos.
Para sistematizar este análisis, el método de Paley sigue siendo la referencia. Este método define el CORA (center of rotation of angulation), un punto crítico en torno al cual debe planificarse la osteotomía. Su correcta identificación determina la localización de la bisagra virtual en el software y, por tanto, el éxito de la corrección(13).
Planificación quirúrgica asistida por software
La planificación preoperatoria con software específico es esencial en la fijación hexápoda. Programas como HEX-Ray® del software del TL-Hex® permiten realizar una planificación preoperatoria de la deformidad y preconstruir el fijador antes de la cirugía. Todos los sistemas se basan en los siguientes pasos:
- Describir la deformidad, introduciendo los grados o mm de las 3 traslaciones y las 3 rotaciones.
- Parámetros de montaje, se describen los aros y struts utilizados, y se describe la situación del aro de referencia respecto al punto donde queremos situar nuestra bisagra virtual, idealmente a nivel del CORA(14).
- Cronograma, que incluye el tiempo de latencia (es decir, el intervalo entre la osteotomía y el inicio de la corrección) y el ritmo de distracción, que habitualmente es de 1 mm o 1° al día, ajustable según la edad y la biología del paciente.
- Prescripción, el software genera un plan de corrección progresivo que indica al paciente el número de giros o mm diarios que tiene que mover cada strut para conseguir la corrección(9,15).
Técnicas de osteotomía mínimamente invasiva
La fijación externa hexápoda se fundamenta en la preservación de la biología ósea mediante osteotomías percutáneas. En la tibia distal, la técnica más utilizada es la de Bastiani, la cual consiste en múltiples perforaciones con broca en un mismo plano, conectadas posteriormente con escoplo. Esta técnica permite realizar una osteotomía controlada respetando el periostio y las partes blandas(16). En el mediopié y el antepié, la técnica Afghan, basada en 4 pequeñas incisiones y el paso de una sierra de Gigli a través de una disección subperióstica, minimiza la agresión quirúrgica y favorece la consolidación ósea(17).
El tiempo de latencia tras la osteotomía varía en función de la edad y la biología del paciente: entre 5 y 7 días en niños, 7 y 8 en adultos y hasta 10-12 días en ancianos o pacientes con factores de riesgo. La distracción posterior se realiza de forma gradual, generalmente a un ritmo de 1 mm o 1° diario, aunque puede reducirse en pacientes con partes blandas comprometidas.
Montajes de fijación externa hexápoda
El diseño del fijador depende de la localización de la deformidad y de la posición del CORA. El astrágalo se considera el epicentro biomecánico del pie y tobillo, y la anatomía se divide en 3 bloques: tibia distal-tobillo, retropié y mediopié-antepié. Según la región afectada, se emplean distintos montajes:
- El montaje de tobillo-retropié aislado es el más versátil y frecuente. Está indicado en artrodesis complejas de tobillo, contracturas en equino, consolidaciones viciosas de la tibia distal y deformidades aisladas del retropié. Su aplicación es relativamente sencilla y ofrece gran versatilidad. Teniendo en cuenta que siempre se deben añadir 5-10 mm de alargamiento en la deformidad para evitar un pinzamiento anterior durante la corrección, así como una hipercorrección de 15-20° de dorsiflexión para disminuir el riesgo de recidivas (Figuras 4A, 4B y 4C).
- Se debe utilizar a nivel proximal un aro cerrado dejando 2 dedos entre el aro y las partes blandas; en la parte distal se realiza posicionamiento de un aro de pie o un aro abierto dos tercios que cumplirían la misma función. Durante el posicionamiento se deben respetar las reglas de la fijación externa (mínimo 3 puntos de fijación por segmento, brocado solo del punto de entrada para evitar pérdida de stock óseo)
- El montaje de tipo butt frame está diseñado para el mediopié y el antepié, permitiendo correcciones multiplanares. Permite colocar una bisagra virtual y corregir cualquier deformidad que afecte a las articulaciones de Chopard y de Lisfranc. Es especialmente útil en el pie cavo neurológico, el pie plano grave o en deformidades de Charcot, y requiere una correcta referencia distal respecto al segundo metatarsiano (Figuras 4D, 4E y 4F).
- Por último, los montajes combinados se emplean en deformidades discordantes que afectan a varios segmentos, como la combinación de un alargamiento tibial proximal con una artrodesis tibiotalar distal. Estos casos son los más complejos y exigen una planificación muy exhaustiva, generalmente con biomodelos 3D (Figuras 4G, 4H y 4I).
rpt.3902.fs2509007-figura4.png
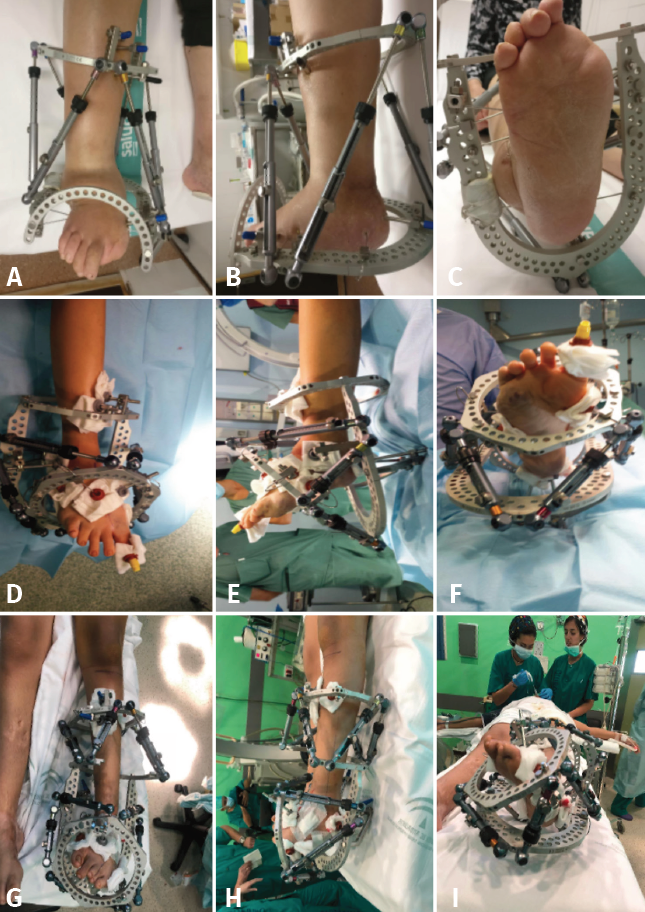
Figura 4. Diferentes montajes de fijación externa hexápoda dependiendo de la región afecta. Montaje de tobillo-retropié aislado en el plano anteroposterior (A), lateral (B) y axial (C); montaje de tipo butt frame en el plano anteroposterior (D), lateral (E) y axial (F); montaje combinado en el plano anteroposterior (G), lateral (H) y axial (I).
En todos los casos, la referencia precisa del fijador respecto al CORA o al ápex de la deformidad es un paso crítico. Una mala referencia compromete el éxito de la corrección y puede condicionar el fracaso del tratamiento.
Montaje del fijador externo hexápodo en la corrección de deformidades complejas de pie y tobillo
La fijación externa circular representa una herramienta de gran utilidad en la corrección de deformidades complejas del pie y tobillo. Su versatilidad y precisión permiten alcanzar un pie plantígrado, estable e indoloro, siempre que el montaje sea correctamente diseñado y ejecutado. El astrágalo constituye el epicentro biomecánico del complejo pie-tobillo; por ello, la alineación del eje Aquíleo-plantar con este hueso es esencial para evitar recidivas.
La planificación quirúrgica exige identificar con exactitud el CORA de la deformidad, definir los bloques anatómicos comprometidos y establecer el montaje adecuado del fijador. El presente trabajo describe el paso a paso del posicionamiento del fijador externo hexápodo en distintas patologías y expone consideraciones técnicas relevantes para reducir complicaciones.
Principios de diseño y bloques anatómicos
El pie y el tobillo pueden dividirse en 3 bloques de fijación: tibia distal-tobillo, retropié y mediopié-antepié (incluyendo articulaciones de Chopart y Lisfranc) (Figura 5). En función del bloque afectado se selecciona el tipo de montaje: el montaje hexápodo de tobillo-retropié aislado, de mayor versatilidad y menor dificultad técnica; el montaje de mediopié-antepié (butt frame), diseñado para deformidades a nivel medio y anterior; y los montajes combinados, que se reservan para deformidades multisegmentarias y requieren planificación exhaustiva con biomodelo 3D.
rpt.3902.fs2509007-figura5.png
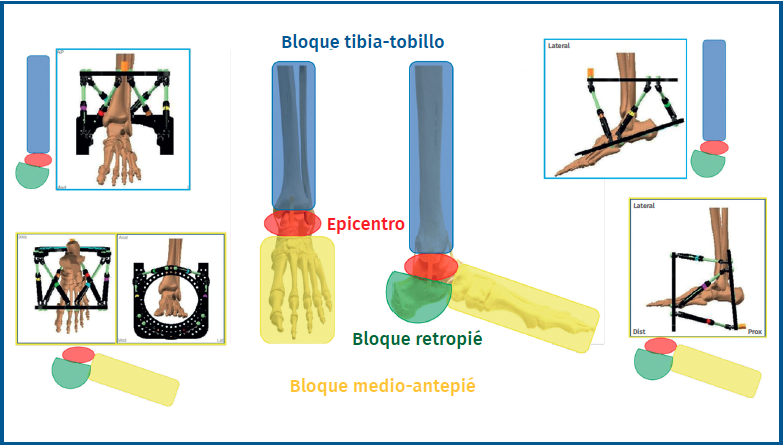
Figura 5. Bloques de corrección: bloque tibia-tobillo, epicentro a nivel del astrágalo, bloque medio-antepié.
Montaje para tobillo y retropié
Este montaje constituye la técnica más accesible y recomendable en etapas iniciales de aprendizaje. La cirugía comienza con la implantación del aro proximal cerrado de referencia, que debe situarse ortogonal a la tibia y con la master tab alineada con la rótula para evitar malrotaciones. Es fundamental respetar un espacio de seguridad con las partes blandas, sobre todo a nivel posterior, para evitar un compromiso del espacio posterior en caso de edema.
A continuación, colocamos el aro distal, ya sea un aro de pie o foot plate, aunque también se puede utilizar un aro abierto dos tercios. Ambos aros deben tener al menos 3 puntos de fijación, utilizándose habitualmente pines en la tibia y en el retropié pines en el calcáneo o agujas en las cuñas y el calcáneo. Es fundamental hacer una simulación de carga intraoperatoria durante la colocación del aro distal para asegurar que su posición no interfiera posteriormente durante la deambulación.
Es recomendable realizar la referencia intraoperatoria del centro geométrico del aro proximal respecto al CORA en los 3 planos, ya que esto garantiza una mayor precisión de la corrección (Figura 6). Tras la colocación de los struts y su retirada temporal, se procede a la osteotomía; en la tibia distal suele emplearse la técnica de Bastiani, mientras que en el mediopié y el antepié resulta más útil la técnica subperióstica de Afghan con sierra de Gigli.
rpt.3902.fs2509007-figura6.png
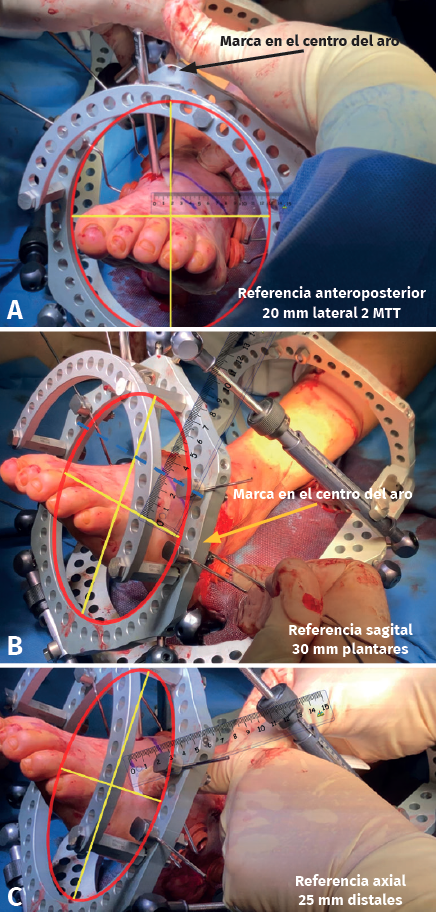
Figura 6. Referencia del punto geométrico del aro respecto al centro de la deformidad (CORA). A: plano anteroposterior; B: plano sagital; C: plano axial. MTT: metatarsiano.
En deformidades en equino, la bisagra virtual se sitúa en la articulación subastragalina/tuberosidad lateral del astrágalo en los planos sagital y axial, y en el centro del astrágalo en el plano anteroposterior. Es aconsejable añadir un alargamiento de 5 a 10 mm para evitar el pinzamiento anterior y planificar una hipercorrección en flexión dorsal de 15 a 20° con el fin de prevenir recidivas.
Una vez finalizado el montaje, se introducen los parámetros en el software especializado, ajustando el tiempo de latencia y el ritmo de distracción según la biología del paciente. El ritmo de distracción suele ser de 1 mm o 1° diario, aunque puede reducirse a 0,5 mm en casos de partes blandas delicadas.
De esta manera, los pasos para la colocación de un montaje de tobillo serían:
- Colocación del aro proximal cerrado y fijación a la tibia con pines.
- Colocación del aro distal (foot plate o aro abierto dos tercios) y fijación mediante pines al calcáneo y/o agujas a las cuñas y el calcáneo.
- Identificar el centro geométrico del aro proximal respecto al CORA.
- Colocación temporal de los struts para comprobar su tamaño y posición.
- Se realiza la osteotomía.
- Colocación definitiva de los struts.
- Programación del software de corrección.
Montaje para mediopié y antepié
El montaje de tipo butt frame constituye la técnica de elección para deformidades en el mediopié y el antepié, como pie cavo, pie plano, pie de Charcot o deformidades multiplanares.
El montaje comienza con la construcción de una estructura en “T”, formada por un aro tibial y un aro de pie, ambos con espacio suficiente para evitar compresión de los tejidos blandos. La fijación del antepié se lleva a cabo mediante agujas en corredores seguros, eventualmente complementadas con un pin en el primer metatarsiano. Con frecuencia se recomienda la fijación de los dedos mediante aguja para prevenir deformidades en garra por contractura de los flexores.
En el pie de Charcot resulta conveniente realizar una corrección aguda inicial de la inclinación calcánea mediante elongación percutánea del tendón de Aquiles y flexión dorsal forzada, fijando temporalmente la posición con agujas calcaneotibiales. Posteriormente, se fija el bloque tibial y se conecta a los struts, mientras que el aro distal se coloca ortogonal al antepié y centrado en el segundo metatarsiano (Figura 7). La referencia, en este caso distal, consiste en medir desde el centro geométrico del aro hasta el eje de osteotomía en los 3 planos. Tras retirar temporalmente los struts, se realiza la osteotomía percutánea con sierra de Gigli a nivel de las cuñas. Para prevenir conflicto cortical durante la corrección progresiva, se aconseja añadir un alargamiento adicional de 10 a 15 mm en los parámetros de deformidad. Finalmente, los datos se introducen en el software, definiendo los parámetros de montaje, de deformidad y el programa de corrección, siempre ajustado al perfil biológico del paciente.
rpt.3902.fs2509007-figura7.png
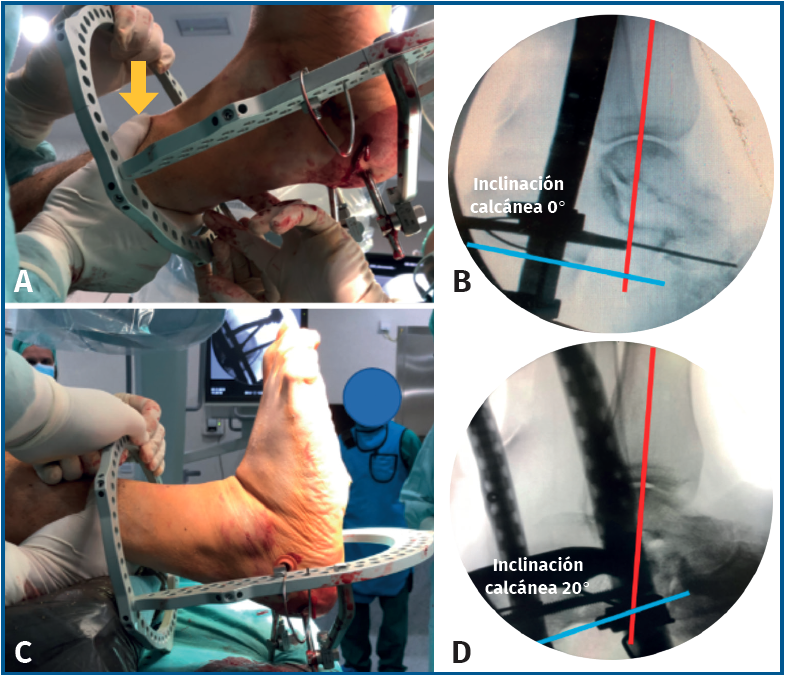
Figura 7. Maniobra de corrección aguda de inclinación calcánea en un pie de Charcot. A: tenotomía percutánea de Aquiles y fijación del calcáneo con aro proximal junto al gemelo; B: escopia de la inclinación calcánea en esta posición; C: maniobra empujando el aro hacia la tibia para corregir la inclinación calcánea con aro ortogonal a tibia; D: escopia de la inclinación calcánea restablecida a su valor normal.
Posibles complicaciones y estrategias de resolución (Tabla 1)
Indicaciones y contraindicaciones
Las indicaciones de la fijación externa hexápoda incluyen deformidades multiplanares graves, neuroartropatía de Charcot, pie diabético con úlcera activa o infección y consolidaciones viciosas asociadas a osteomielitis(18,19,20). Entre las indicaciones relativas se encuentran las deformidades neurológicas como las derivadas de mielomeningocele o parálisis cerebral, las secuelas postraumáticas y algunas deformidades congénitas resistentes. Por el contrario, la técnica está contraindicada en pacientes no colaboradores, en aquellos con enfermedades médicas graves que impidan un seguimiento adecuado y en situaciones donde la piel no pueda tolerar la presencia de un fijador externo.
rpt.3902.fs2509007-tabla1.png
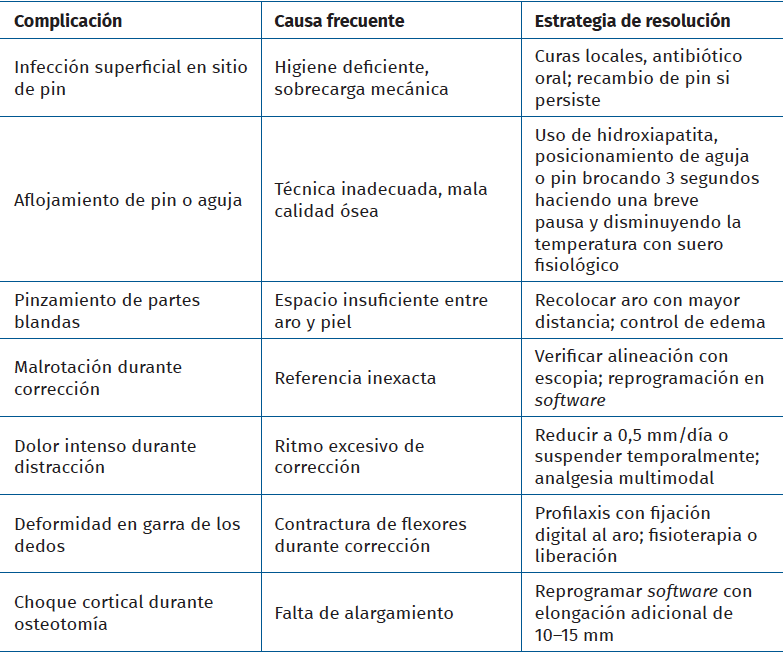
Tabla 1. Posibles complicaciones y estrategias de resolución
Aplicaciones clínicas
La neuroartropatía de Charcot es una de las principales indicaciones de la fijación hexápoda(18,21). En estos pacientes, la cirugía abierta suele fracasar debido a la mala calidad ósea, la afectación vascular y la presencia frecuente de infecciones. El montaje de tipo butt frame permite corregir gradualmente la típica deformidad en mecedora del mediopié, eliminando la presión plantar y favoreciendo la cicatrización de las úlceras. En los casos de afectación tibiotalar con desaxación grave, los montajes de tobillo-retropié permiten realizar artrodesis de rescate con buenos resultados(18) (Figura 7).
En el pie diabético, el hexápodo permite tratar infecciones y osteomielitis activas, corregir deformidades sin necesidad de grandes resecciones y preservar la longitud del pie. Además, en determinados casos puede combinarse con fijación interna secundaria una vez alcanzada la corrección(20). En pacientes neurológicos con pie cavo, equino-varo o deformidades rotacionales, la corrección progresiva mediante hexápodo ayuda a equilibrar la tensión muscular y a obtener pies funcionales plantígrados(19) (Figura 8). Asimismo, en las secuelas postraumáticas con consolidaciones viciosas o pérdida de stock óseo, la fijación externa ofrece la posibilidad de realizar transporte óseo y restaurar la alineación. Finalmente, en deformidades congénitas resistentes, como el pie zambo recidivado o ciertas patologías sindrómicas, la fijación hexápoda constituye una herramienta de gran utilidad.
rpt.3902.fs2509007-figura8.png

Figura 8. Imágenes clínicas preoperatorias (A-C) y tras la intervención (D-F) en una paciente de 16 años con antecedente de tetralogía de Fallot y una deformidad en pie cavo aducto neurológico con un varo de retropié estructurado secundario a una contractura isquémica de Volkmann tras un cateterismo femoral.
Resultados publicados
Las series publicadas muestran tasas de consolidación superiores al 90% en pacientes con pie de Charcot tratados con fijación externa hexápoda. Se describe una reducción significativa de las úlceras plantares tras la corrección y la posibilidad de carga precoz en la mayoría de los casos(18,20). Las complicaciones relacionadas con el material, como la rotura de tornillos o agujas, aparecen en torno al 15-20%, pero rara vez comprometen el resultado final.
Las complicaciones más frecuentes incluyen infecciones superficiales de los trayectos de pines, que habitualmente se resuelven con curas locales y antibióticos orales, y la rotura de tornillos o agujas, más habitual en pacientes con déficit sensitivo. También son relativamente comunes las dehiscencias de la piel en zonas de presión, que requieren un manejo cuidadoso mediante curas avanzadas o cobertura cutánea. El dolor y la tolerancia al fijador son aspectos que vigilar durante el seguimiento y suelen controlarse con analgesia pautada y fisioterapia.
Discusión y perspectivas futuras
En comparación con la cirugía abierta, la fijación externa hexápoda asistida por software ofrece ventajas claras. Permite realizar correcciones progresivas y ajustables, con menor agresión quirúrgica y preservación biológica. Posibilita la carga precoz, aspecto fundamental en pacientes con baja tolerancia a la descarga. Sus limitaciones incluyen la incomodidad relativa del fijador, el tiempo prolongado de tratamiento y la necesidad de un equipo quirúrgico experimentado. No obstante, sus resultados son reproducibles y se ha consolidado en la literatura como una técnica de referencia en los escenarios más complejos.
El futuro de la fijación hexápoda pasa por la integración de nuevas tecnologías. La mejora de los softwares de planificación, como el Smart-TSF®, junto con el desarrollo de interfaces más intuitivas e incluso de realidad aumentada, permitirá correcciones más precisas. La inteligencia artificial puede aportar simulaciones automáticas de corrección y personalización del tratamiento. La impresión 3D de guías quirúrgicas adaptadas a cada paciente y la cirugía híbrida, que combina la corrección progresiva mediante fijación externa con la estabilización definitiva mediante fijación interna, representan líneas de desarrollo prometedoras.
Conclusiones
La fijación externa hexápoda asistida por software constituye una herramienta fundamental en el tratamiento de las deformidades complejas de pie y tobillo. Su capacidad para realizar correcciones multiplanares precisas, preservando la biología y facilitando la carga precoz, la convierte en una opción de primera línea en pacientes de alto riesgo. El uso de biomodelos 3D ha transformado la planificación quirúrgica, permitiendo anticipar dificultades y optimizar los resultados. Aunque requiere experiencia quirúrgica y un seguimiento cuidadoso, sus beneficios superan ampliamente sus limitaciones, consolidándola como una técnica de referencia en la ortopedia moderna.
Figuras
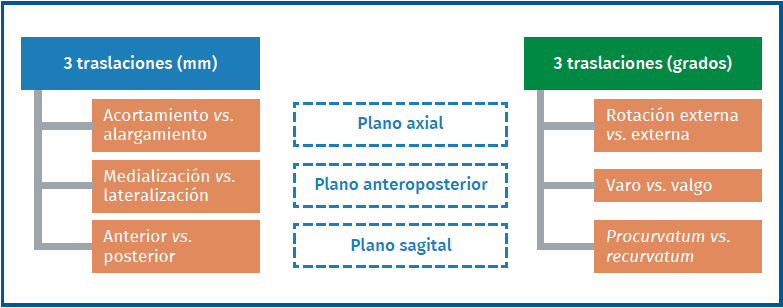
Figura 1. Seis grados de libertad: 3 traslaciones y 3 rotaciones que debemos describir en la deformidad.

Figura 2. Dos biomodelos fabricados a partir de tomografía computarizada, colocados junto a la deformidad del paciente al que corresponden antes de la cirugía.
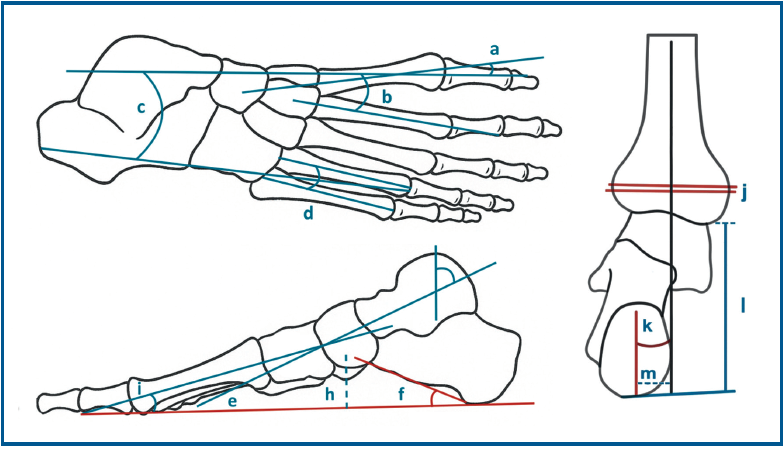
Figura 3. Mediciones que realizar en pie y tobillo para describir la deformidad. a: ángulo astrágalo del primer metatarsiano: b: ángulo intermetatarsiano: c: ángulo astragalocuboides; d: ángulo entre 4.º y 5.º metatarsianos; e: ángulo de Méary; f: ángulo de inclinación del calcáneo; h: altura de escafoides a plano de carga; i: ángulo de inclinación del primer metatarsiano; j: ángulo tibiotalar en anteroposterior; k: ángulo tibiocalcáneo; l: altura de maléolo medial a plano carga; m: traslación lateral del calcáneo respecto al eje tibial.
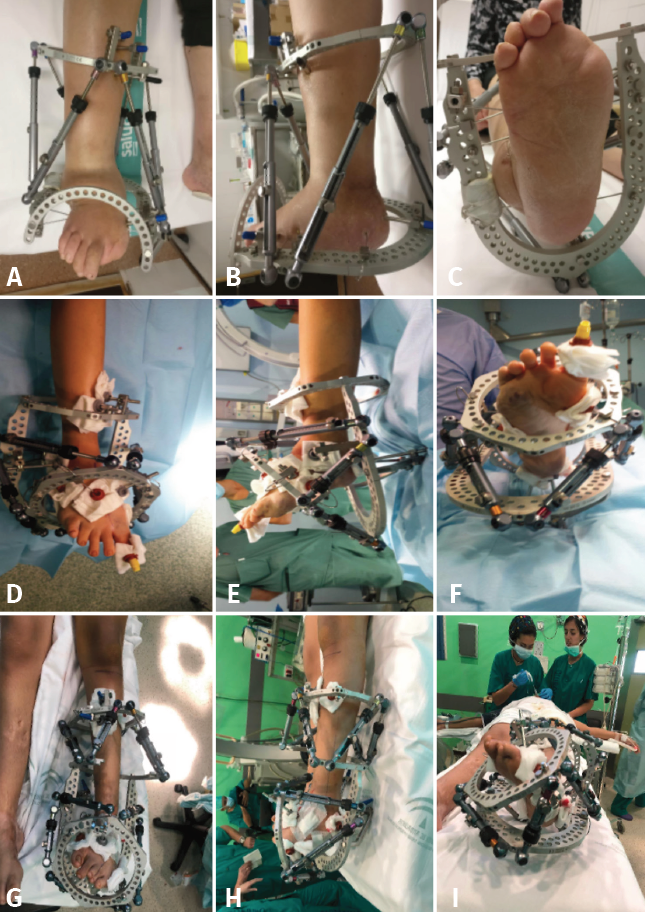
Figura 4. Diferentes montajes de fijación externa hexápoda dependiendo de la región afecta. Montaje de tobillo-retropié aislado en el plano anteroposterior (A), lateral (B) y axial (C); montaje de tipo butt frame en el plano anteroposterior (D), lateral (E) y axial (F); montaje combinado en el plano anteroposterior (G), lateral (H) y axial (I).
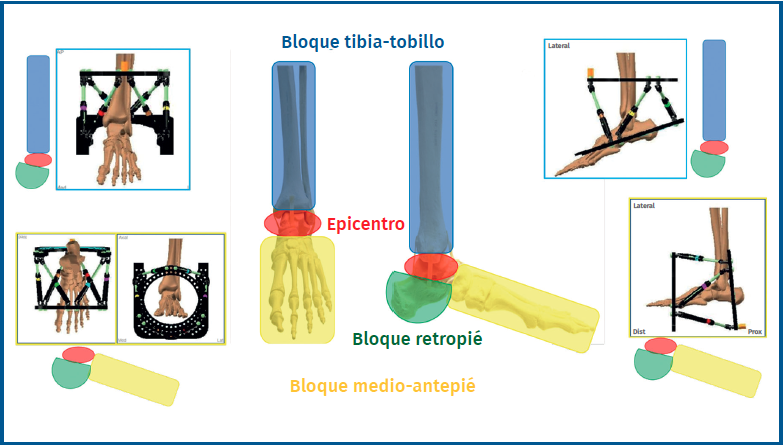
Figura 5. Bloques de corrección: bloque tibia-tobillo, epicentro a nivel del astrágalo, bloque medio-antepié.
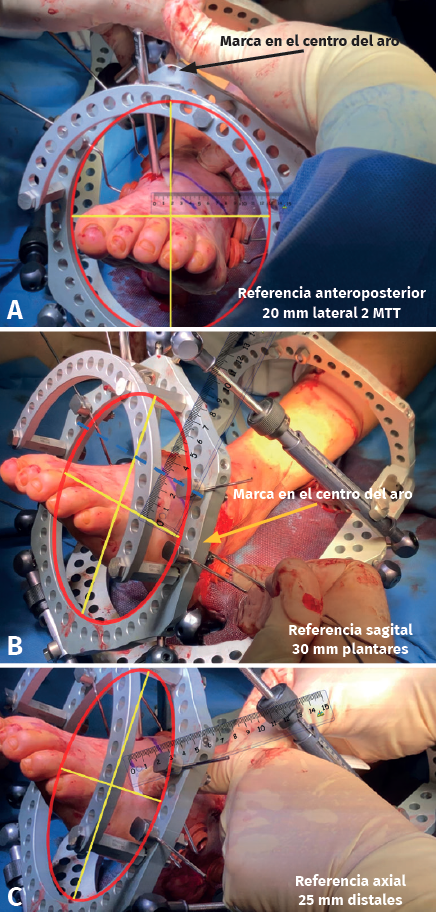
Figura 6. Referencia del punto geométrico del aro respecto al centro de la deformidad (CORA). A: plano anteroposterior; B: plano sagital; C: plano axial. MTT: metatarsiano.
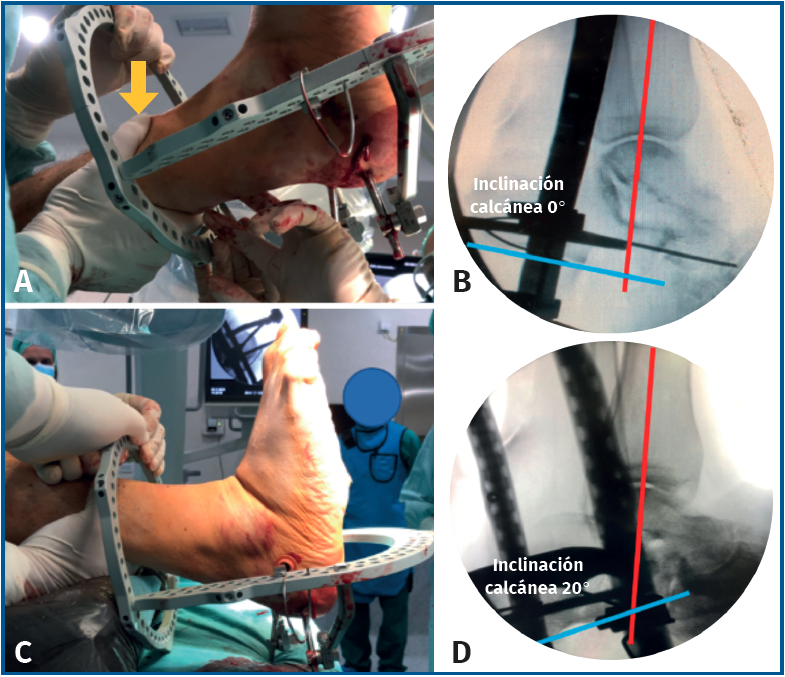
Figura 7. Maniobra de corrección aguda de inclinación calcánea en un pie de Charcot. A: tenotomía percutánea de Aquiles y fijación del calcáneo con aro proximal junto al gemelo; B: escopia de la inclinación calcánea en esta posición; C: maniobra empujando el aro hacia la tibia para corregir la inclinación calcánea con aro ortogonal a tibia; D: escopia de la inclinación calcánea restablecida a su valor normal.

Figura 8. Imágenes clínicas preoperatorias (A-C) y tras la intervención (D-F) en una paciente de 16 años con antecedente de tetralogía de Fallot y una deformidad en pie cavo aducto neurológico con un varo de retropié estructurado secundario a una contractura isquémica de Volkmann tras un cateterismo femoral.
Tablas
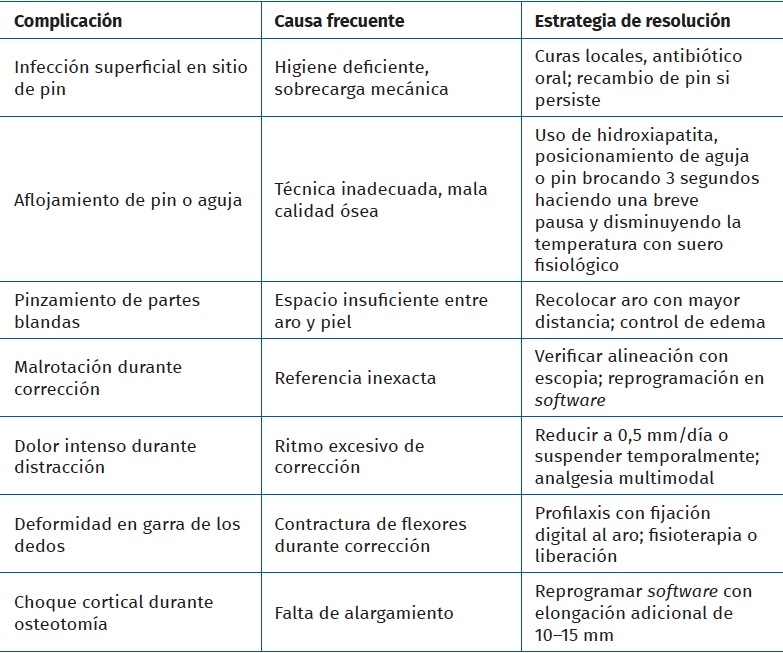
Tabla 1. Posibles complicaciones y estrategias de resolución
Información del artículo
Cita bibliográfica
Responsabilidades éticas
Protección de personas y animales. Los autores declaran que para esta investigación no se han realizado experimentos en seres humanos ni en animales.
Confidencialidad de los datos. Los autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes.
Derecho a la privacidad y consentimiento informado. Los autores declaran que en este artículo no aparecen datos de pacientes.
Financiación. Los autores declaran que este trabajo no ha sido financiado.
Conflicto de intereses. El autor Juan Carlos García de la Blanca es consultor de docencia y formación para MBA, Orthofix, Smith and Nephew y Stryker.
Descargar artículo:
Licencia:
Este contenido es de acceso abierto (Open-Access) y se ha distribuido bajo los términos de la licencia Creative Commons CC BY-NC-ND (Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional) que permite usar, distribuir y reproducir en cualquier medio siempre que se citen a los autores y no se utilice para fines comerciales ni para hacer obras derivadas.
Comparte este contenido
En esta edición
- La interpretación de resultados en cirugía de pie y tobillo
- Corrección de deformidades complejas de pie y tobillo mediante fijación externa hexápoda: planificación asistida por <em>software </em>y biomodelos 3D
- ¿Consideramos la <em>Revista del Pie y Tobillo</em> un vehículo adecuado para la difusión de nuestros trabajos?
- ¿Publican los miembros del comité editorial en su propia revista? Análisis de la publicación de los miembros del comité editorial como autores en las principales revistas de cirugía de pie y tobillo
- Influencia del estado de ánimo en los resultados de la cirugía del <em>hallux valgus</em>
- Análisis de la sindesmosis tibioperonea empleando tomografía axial computarizada convencional y dispositivo de carga simulada ajustable
- Pie cavo-varo sutil y cirugía de los tendones peroneos. ¿Mejora la osteotomía de calcáneo los resultados clínicos?
- Fijación externa de tipo hexápodo para la corrección de un pie zambo neurológico
- Rotura aguda del tendón tibial posterior: descripción de un caso clínico
- Revista de revistas
Más en PUBMED
Más en Google Scholar

Revista del pie y tobillo está distribuida bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.